



Arduino MPU 6050 – Gyro Sensor- Yön Sensörü – ivme sensörü nedir konusuna yer vereceğiz.
Jiroskop veya Türkçe adıyla düzdöner, dönüş ekseninin kendi kendine herhangi bir yönü kabul etmekte özgür olduğu dönen bir çark veya disktir. Açısal hız ve dengenin korumasına göre dönerken bu eksenin yönü devrilmeden veya dayanağın yönünden etkilenmez. Bundan dolayı jiroskoplar yönü ölçmek veya elde etmek için yararlıdır.
Elektronik cihazlarda bulunan elektronik mini yonga paketlenmiş MEMS jiroskopları, katı halde daire lazerler, fiber optik jiroskoplar ve aşırı duyarlı kuantum jiroskopu gibi diğer çalışma ilkelerine dayalı olan jiroskoplar da bulunmaktadır.
Jiroskopların uygulamaları manyetik pusulaların çalışmadığı veya radyo kontrollü helikopterler ya da insansız hava araçları gibi uçan araçların ve dinlence amaçlı teknelerin, ticari gemilerin sabitleşmesi için yeterince kesin olmadığı atalet gezinti sistemlerini kapsar. Onların netliğine bağlı olarak jiroskoplar tünel madenciliğinde yön bulmak için topaç teodolitlerde kullanılır. Jiroskoplar sabitlikte yardımcı olmak için manyetik pusulaları tamamlayan veya yerini alan topaç pusulaları yapmakta da kullanılabilir veya ataletli güdüm sisteminin parçası olarak kullanılabilir.
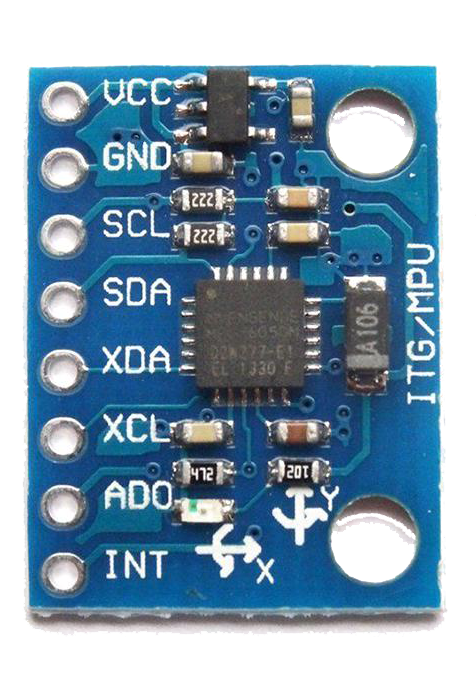
MPU6050 hava araçlarında, denge robotlarında ve daha birçok alanda sıklıkla tercih edilen bir sensördür. Üzerinde 3 eksenli bir Gyro ve 3 eksenli bir açısal ivme ölçer bulunduran 6 eksenli bir IMU kartıdır.
- Çalışma Gerilimi : 3.0 V – 5.0 V
- Gyro Ölçüm Aralığı : ±250, ±500, ±1000, ±2000 ⁰/s
- Açısal İvme Ölçer Ölçüm Aralığı : ±2, ±4, ±8, ±16 g
- Haberleşme Arayüzü : I2C
- Boyutlar : 20.3mm X 15.6mm
Arduino ile mpu6050 gyro sensör kullanarak bir çok projeyi gerçekleştirmek mümkündür.
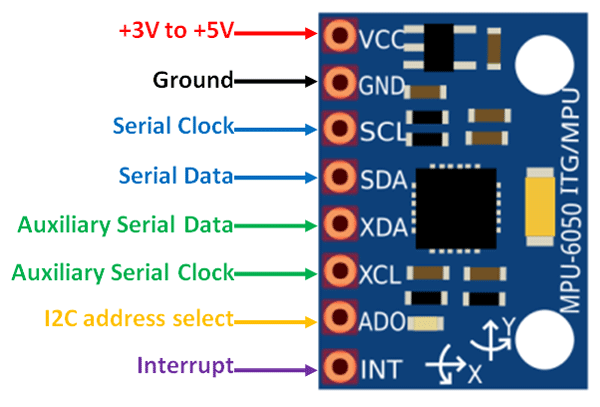
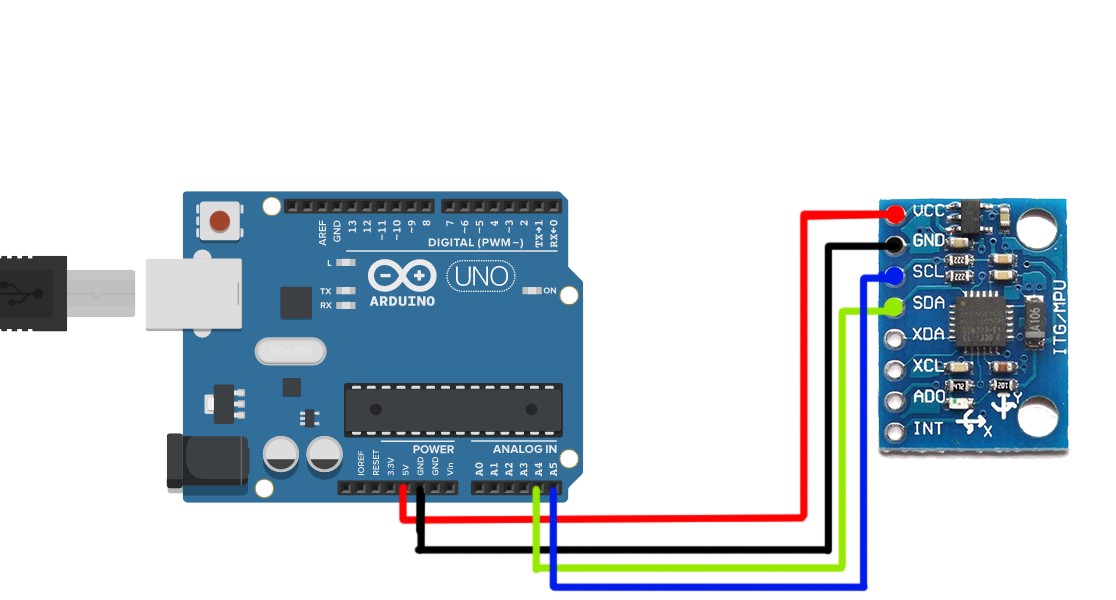
bağlantı şemasında SCL ve SDA pinleri ile i2C haberleşme kullanarak bağlantı sağlanmıştır. XDA,XCl,AD0 ve INT pinleri daha sonraki projelerde kullanılacaktır.
//Görsel İşitsel Teknoloji Kanalı
//wwww.teknikerler.com
//Kerim Arı Youtube kanalı MPU 6050 Kodları - kullanımı örnek Kodları
#include <MPU6050.h>
#include <Wire.h>
MPU6050 git_sensor;
int ivmeX , ivmeY , ivmeZ , GyroX , GyroY , GyroZ;
void setup() {
Serial.begin(9600);
Wire.begin();
git_sensor.initialize();
}
void loop() {
git_sensor.getMotion6(&ivmeX, &ivmeY, &ivmeZ, &GyroX, &GyroY, &GyroZ);
Serial.print("ivme X-Y-Z: ");
Serial.print(ivmeX);
Serial.print("\t");
Serial.print(ivmeY);
Serial.print("\t");
Serial.println(ivmeZ);
Serial.print("Gyro X-Y-Z: ");
Serial.print(GyroX);
Serial.print("\t");
Serial.print(GyroY);
Serial.print("\t");
Serial.println(GyroZ);
delay(500);
}
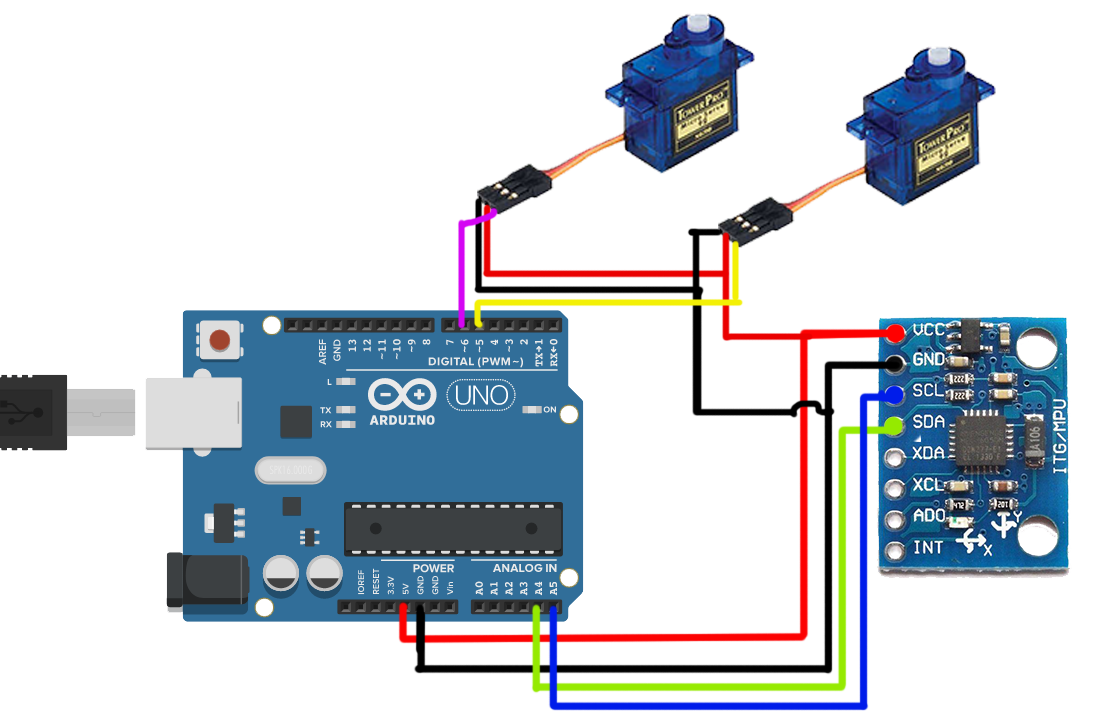
SERVO MOTOR NASIL KULLANILIR
//Görsel İşitsel Teknoloji Kanalı
//wwww.teknikerler.com
//Kerim Arı Youtube kanalı MPU6050 SERVO Kodları - kullanımı örnek Kodları
#include <MPU6050.h>
#include <Wire.h>
#include <Servo.h>
Servo servoX;
Servo servoY;
MPU6050 git_sensor;
int ivmeX , ivmeY , ivmeZ , GyroX , GyroY , GyroZ;
void setup() {
Serial.begin(9600);
Wire.begin();
servoX.attach(5);
servoY.attach(6);
servoX.write(0);
servoY.write(0);
git_sensor.initialize();
}
void loop() {
git_sensor.getMotion6(&ivmeX, &ivmeY, &ivmeZ, &GyroX, &GyroY, &GyroZ);
int ServoXP = ivmeX;
int ServoYP = ivmeY;
//Serial.println(ivmeX);
//Serial.println(ivmeY);
ServoXP = map(ServoXP, -17500, 17500, 180, 0);
ServoYP = map(ServoYP, -17500, 17500, 180, 0);
Serial.print(ServoXP);
Serial.print("\t\t");
Serial.println(ServoYP);
servoX.write(ServoXP);
servoY.write(ServoYP);
delay(10);
}
MPU6050 HAKKINDA DETAYLI BİLGİ İÇİN VİDEOYU İZLEYEBİLİRSİNİZ
MPU 6050 KÜTÜPHANEYİ İNDİRMEK İÇİN TIKLAYINIZ